
Menu:
ArduCopter
I have been interested in quadcopters since I first saw videos of one made by Draganfly. I decided to buy an ArduCopter, which is a quadcopter based on the Arduino platform. The image below shows all of the components required to build the ArduCopter.

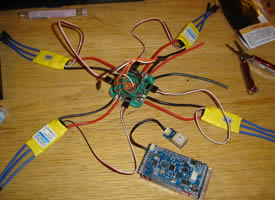
The first image below shows the electronic speed controls (ESCs) after being connected to the power distribution board. The second image shows the motors attached to the each of the four arms.

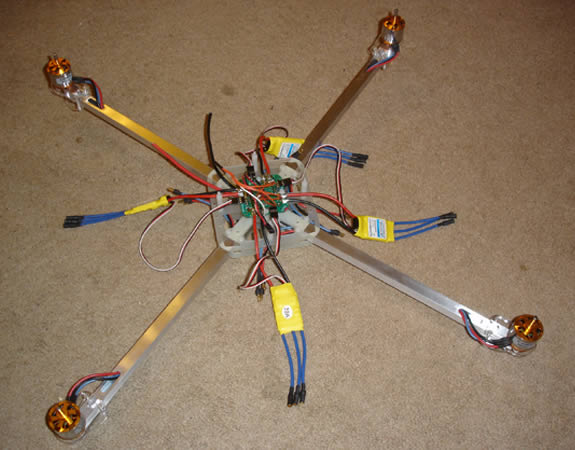
Below is an image of the quadcopter starting to take form as each of the subsections is attached.
The image below shows the completed quadcopter.

The video below shows one of the first flights of the ArduCopter.
Towards the end of the video as I applied full throttle one of the motors stopped spinning and flipped the quadcopter. I believe this could have happened if the ESC for that motor was not calibrated correctly.
After a few more flights I had my first serious crash. I let it drift into a tree at around 12 feet in the air. The final drop to the ground was from six or seven feet. One propeller, one motor mount, and one arm were damaged; the total cost to replace the damaged parts was $19.50. The image below shows the damage.

After the new parts came, I rebuilt the quadcopter and strapped a ContourGPS camera on top. The image below shows everything together.

After a few successful flights the quadcopter crashed again, this time because of issues caused by the ESCs or motors. Below is a brief point of view video with the camera mounted on top showing the flight and crash. As shown in the video, the quadcopter will tilt violently in the direction of one of the motors. I have read this can be caused by a faulty ESC or motor, or by a loose power connection between an ESC and motor. Recalibrating the ESCs did not fix anything.
After this final crash I stopped rebuilding the quadcopter. I decided I would eventually design my own frame so I would be able to make repairs more easily and cheaper than ordering new parts from the manufacturer. Information about this new project can be found on the Hexacopter page.
Page created: 2011